14
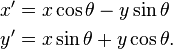
Est-ce que l'une ou l'autre des approches ci-dessous utilise les bonnes mathématiques pour faire pivoter un point? Si oui, lequel est correct?Trigonométrie appropriée pour faire pivoter un point autour de l'origine
POINT rotate_point(float cx,float cy,float angle,POINT p)
{
float s = sin(angle);
float c = cos(angle);
// translate point back to origin:
p.x -= cx;
p.y -= cy;
// Which One Is Correct:
// This?
float xnew = p.x * c - p.y * s;
float ynew = p.x * s + p.y * c;
// Or This?
float xnew = p.x * c + p.y * s;
float ynew = -p.x * s + p.y * c;
// translate point back:
p.x = xnew + cx;
p.y = ynew + cy;
}

Je ne Je comprends très bien. Quels sont cx et cy? De plus, vous avez déclaré votre fonction de type POINT, mais elle ne renvoie pas de POINT, ni même rien. –
@Brian Hooper: +1 pour souligner les avantages des noms de variables significatifs;) – Cogwheel